Staff Detail: Kazuya KAWAMURA
Profile
- Name:
- Kazuya KAWAMURA
- Title:
- Associate Professor
- Degree:
- Ph.D.
- Keyword:
- Surgical assisted robot,surgical robot simulation for mechanical desgin optimization, operability evaulation, rehabilitation robot, respiratory measurement
- E-Mail:
- kawamura[at]chiba-u.jp
Research Subject
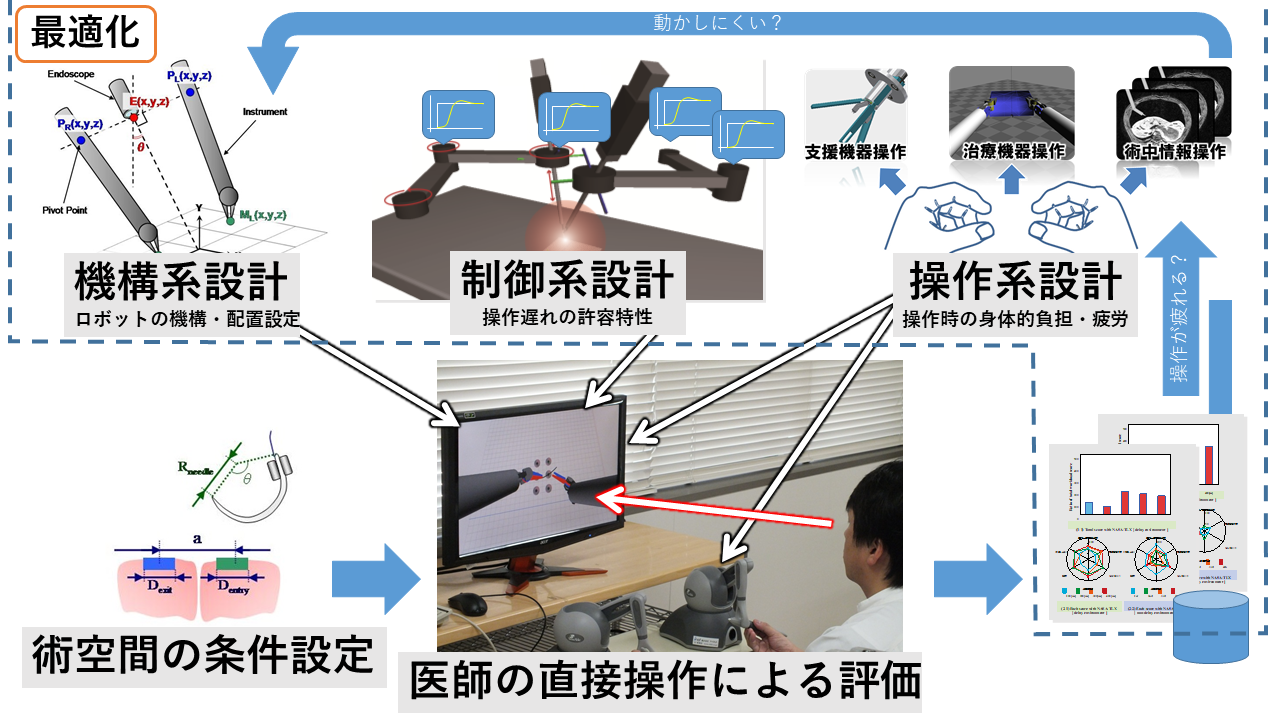
Simulation based mechanical design method for surgical assisted robot
In recent year, robot technology has been required to apply the difficult surgery, but the robot can only be used in a limited number of clinical cases. This problem is caused due to difficulty of use of the robot for users. In our study, we proposed a simulation based mechanical design method of surgical assisted robot. And we also developed an optimization method of the design based on human operation and operability evaluation for assisting to apply the developed robot to clinical case rapidly. As one of on-going task collaborated with pediatric surgeons, we are trying to evaluate the mechanical design of forceps manipulator suitable for pediatric surgery.
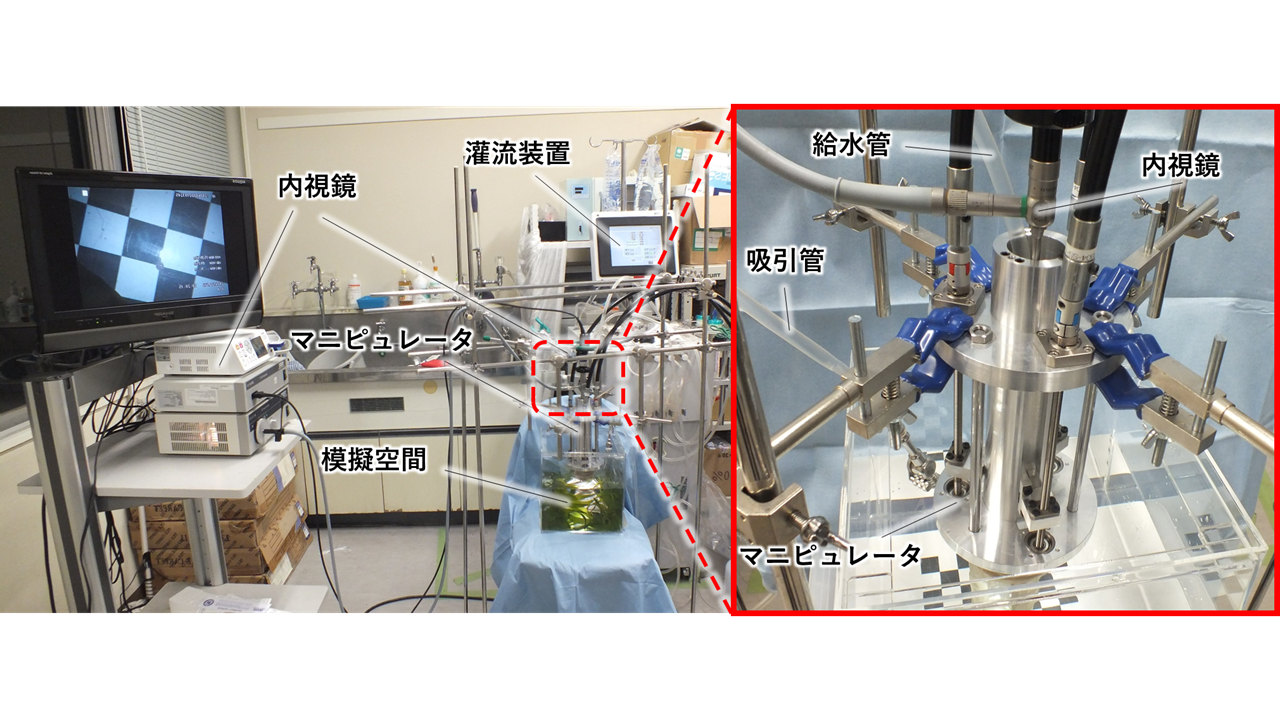
Sheath-shaped surgical robot system for assisting surgical workspace creation in WaFLES
Minimally invasive surgical techniques are continually being developed to reduce the invasiveness of various surgical procedures, patients’ postoperative pain, complications and hospitalization time. Water Filled Laparo-endoscopic Surgery (WaFLES) is a new surgical technique which is performed with liquid in the abdominal cavity. For realizing both a stable creation of surgical workspace and management of the floating organs, we proposed sheath-shaped robotic manipulator to create a surgical workspace like a retracting tool. As one of on-going task, we develop the sensing system to manage the floating internal organs for supporting the surgical workspace creation safety.