スタッフ紹介 川村 和也
- 氏名:
- 川村 和也 Kazuya KAWAMURA
- 職名:
- 准教授
- 学位:
- 博士(工学)
- Keyword:
- 手術支援ロボット,ロボット設計シミュレーション,操作性評価,リハビリテーションロボット,呼吸計測
- E-Mail:
- kawamura[at]chiba-u.jp
[at]は@に置き換えてください
テーマと内容
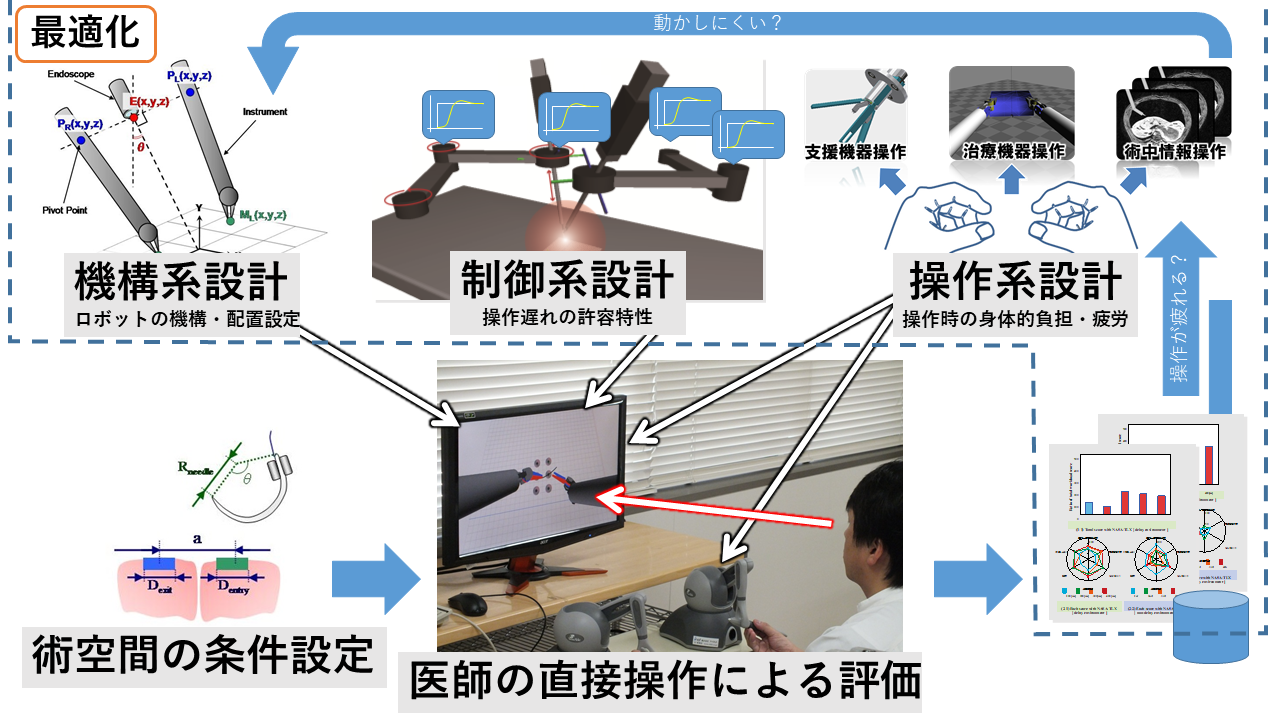
術空間再現シミュレーションを用いた手術支援ロボットの設計手法構築
手術支援ロボットは,医師・患者双方の負担を軽減した治療が期待され,様々な症例の治療法への適用が求められています。このことから手術支援ロボットの使用環境は多岐にわたり,状況に応じて適切な機構が必要になります。開発当初から適用症例を想定した機構の設計を行うためには, 設計段階から利用段階に至った後の予測までを一貫したプロセスで詳細に検証が有効と考えます。本研究では,任意の条件を設定可能であり,一貫した環境構築を支援するシステムとして,VRシミュレーション技術に着目しました。医師の手技動作等、開発前の要求仕様の検証に必要な基礎データに基づいた設計手法構築に向け,数理シミュレータと実物の操作入力システムを統合した術空間再現シミュレーションを開発しています。このシステムを使用し,小児外科を対象としたロボット鉗子の機構を最適化する検証を小児外科医との共同で行っています。
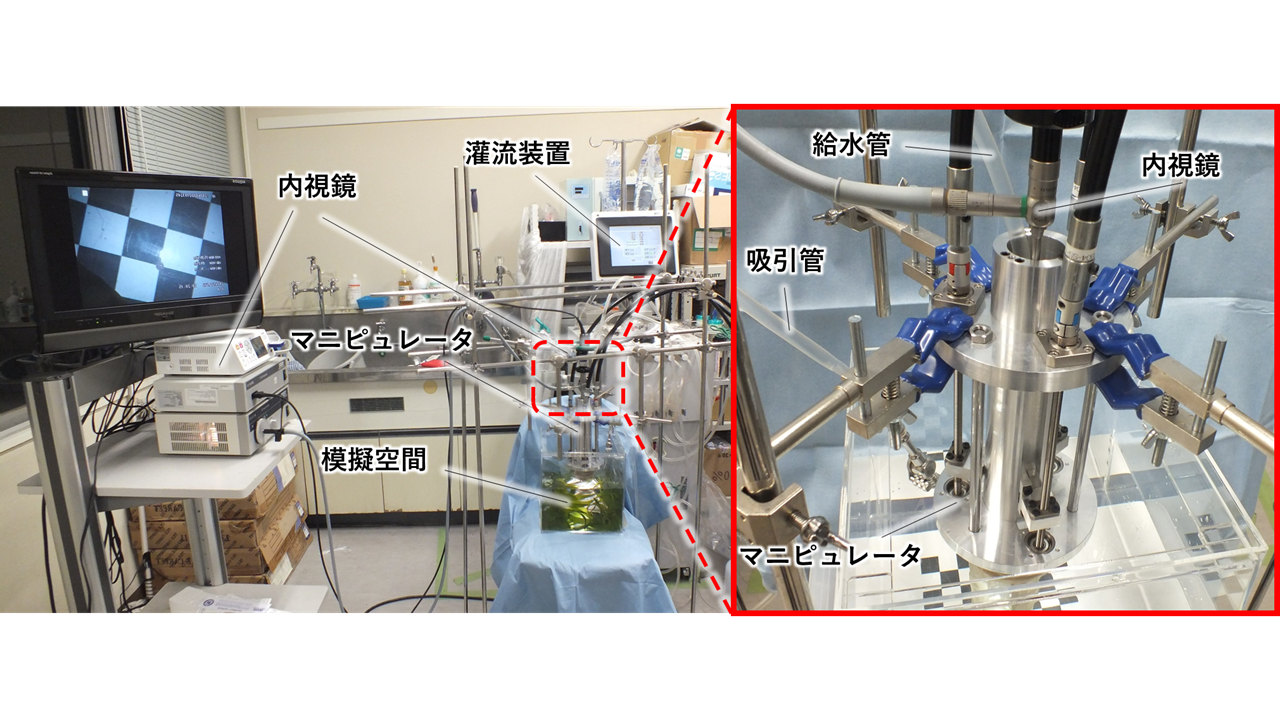
等張液灌流式腹腔鏡手術(WaFLES)を支援するロボットシステムの開発
フロンティア医工学センターでは、体腔内を等張液で満たした環境において治療を実施する等張液灌流式腹腔鏡手術(WaFLES)という手術の構築を医師主導のもと進めています。 WaFLESでは、単孔式手術での実施が想定されているため、術具同士の干渉により操作性が悪化し、術者への負担増加につながる単孔式手術特有の課題や,浮力にて浮遊した臓器により術野が不安定になる課題があります。本研究では、外套管内に鉗子、電気メス、内視鏡など必要な術具を全て挿入して用いる単孔式手術を想定した、手術空間を確保する機能を有する外套管型空間確保マニピュレータの開発を行っている。液中下での動作可能なセンサの開発、それを用いた検知手法の構築などを進めています。